The wireless 3D game controller version 1.0 is the result of HBO project (pre Nintendo Wii era). The wireless game controller system uses four tilt switches and four AM signal-meters to determine the tilting position and location in 3D space of the wireless game controller. We liked to use accelerometers, but these were out of our budget.
The game controller itself is build around an Atmel AVR ATTiny15L microcontroller combined with a 433MHz AM transmitter, four tilt switches, and four normal pressure switches. The microcontroller controller is programmed using AVR assembler, the program scans all the 8 buttons (4 tilt + 4 normal) and transmits a data frame with their status using the AM transmitter.
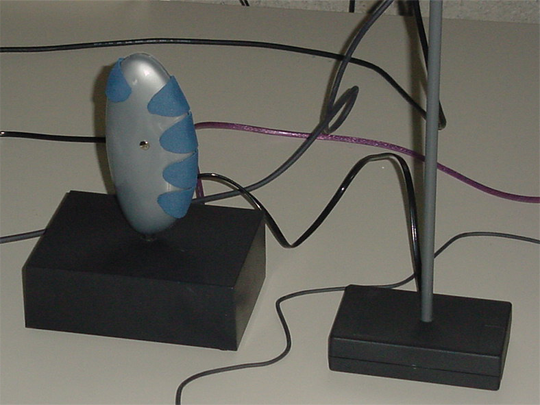
The base station contains an Atmel C51 AT89C5132 microcontroller combined with a 433MHz AM receiver, four AM signal-meters divided over two columns (every column has one signal-meter in the top and one in the bottom), and an USB1.1 connection to a PC. This controller is programmed using ANSI C, the program reads the data frame received from the wireless game controller, samples the signal-strength of the four AM signal-meters, and combines this information into a single USB data frame.

The PC reads the USB data from the base station using a small Delphi application, this application calculated the controller’s position using the signal strengths from the signal-meters, enables the user to calibrate the controller, and makes it possible to map virtual mouse and keyboard inputs to the controller inputs. This mapping makes it possible to use the controller in every existing application.